

1. Ze względu na sposób działania zaworów dzielimy je na:
- w stanie bezprądowym zamknięte – NC
- w stanie bezprądowym otwarte – NO
2. Ze względu na specyficzne cechy konstrukcyjne produkowane przez nas zawory elektromagnetyczne można podzielić na 4 charakterystyczne rodzaje (grupy):
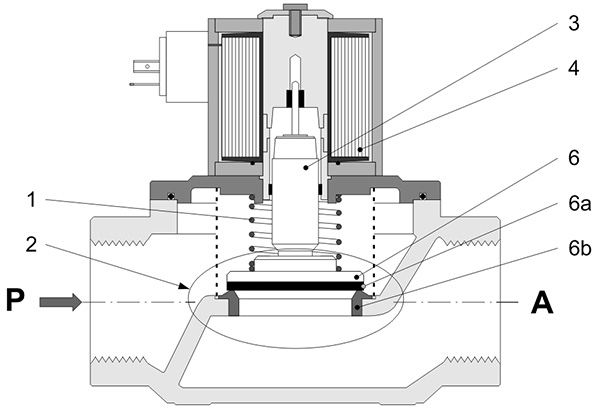
W zaworach tego typu siła działająca na element sterujący przepływem (zawieradło) pochodzi bezpośrednio od pola magnetycznego indukowanego przez prąd płynący w cewce (4).
Rdzeń (3) elektromagnesu połączony mechanicznie z grzybkiem (6) zaworu stanowi zawieradło, które bezpośrednio otwiera lub zamyka otwór przepływowy zaworu głównego (2) w zależności od obecności lub braku napięcia zasilającego cewkę. Odbywa się to bez udziału ciśnienia różnicowego ΔP panującego na zaworze.
W stanie beznapięciowym, kiedy prąd przez cewkę nie płynie, sprężyna (1) dociska grzybek (6) z uszczelką (6a) do gniazda (6b) zaworu i zamyka przepływ.
Z chwilą podania napięcia na cewkę płynący przez nią prąd indukuje pole magnetyczne, które wciąga rdzeń do środka cewki Powstaje w ten sposób siła podnosząca zawieradło i otwierająca zawór.
Cechy charakterystyczne:
- działanie tych zaworów nie zależy od ciśnienia procesowego medium ani od wielkości przepływu
- mogą pracować niezależnie od istniejącej różnicy ciśnień ΔP na zaworze
- pracują prawidłowo już przy zerowym ciśnieniu różnicowym (ΔPMIN = 0)
- ich ograniczeniem konstrukcyjnym jest wielkość maksymalnej różnicy ciśnień ΔPMAX, jaka może wystąpić na zaworze. Zależy ona od siły udźwigu elektromagnesu i średnicy nominalnej otworu przepływowego zaworu (im większa średnica nominalna tym mniejsza wartość ΔPMAX dla tego samego elektromagnesu)
- przy ciśnieniu większym od maksymalnego ciśnienia różnicowego ΔPMAX zawór nie będzie pracował poprawnie ( będzie się zawieszał)
- krótki czas zadziałania (rzędu od kilkunastu do kilkudziesięciu milisekund)
- wysoka niezawodność ze względu na prostotę konstrukcji i małą ilość części wewnętrznych
- duża żywotność – w przypadku niektórych konstrukcji może dochodzić do kilku milionów cykli roboczych
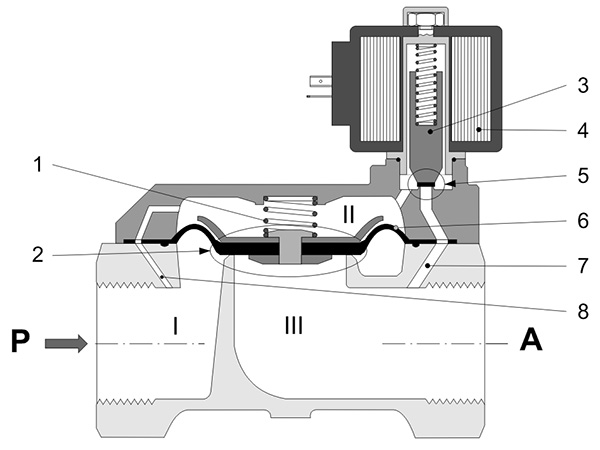
Zawory tego typu wykorzystują istnienie różnicy ciśnień na zaworze do wywołania siły otwierającej zawór i utrzymującej go w pozycji otwarcia. Składają się z dwóch zasadni-czych elementów: zaworu głównego (2) i zaworu-pilota (5). Posiadają także dwa kanały: pilotowy (7) i mniejszy wyrównawczy (8). Zawór-pilot pracuje jak normalny zawór bezpośredniego działania.
W stanie zamkniętym ciśnienia nad membraną (6) (obszar II) i pod membraną w obszarze I są jednakowe i równają się ciśnieniu od strony dopływu P (obszary I i II połączone są na stałe otwartym kanałem wyrównawczym (8), a kanał pilotowy (7) jest zamknięty). Z chwilą podania napięcia na cewkę (4) otwiera się zawór-pilot (5) i kanał pilotowy (7) zostaje otwarty. Istniejąca różnica ciśnień pomiędzy obszarem II nad membraną a obszarem III od strony wypływu A powoduje przepływ medium przez kanał pilotowy. Ponieważ przepływ przez kanał pilotowy (7) jest większy niż przez kanał wyrównawczy (8), ciśnienie w obszarze II nad membraną zaczyna spadać. Powstająca w ten sposób różnica ciśnień ΔP na membranie, pomiędzy obszarem I od strony napływu a obszarem II nad membraną, wytworzy siłę, która pokonując siłę nacisku sprężyny dociskowej (1) podniesie membranę (zawieradło) i otworzy zawór główny (2). Siła ta będzie utrzymywać zawieradło w pozycji otwarcia.
Zamknięcie zaworu-pilota (po zaniku napięcia na cewce) zatrzymuje przepływ medium przez kanał pilotowy (7). Ze względu na istniejący cały czas przepływ przez kanał wyrównawczy (8) ciśnienie w obszarze II nad membraną zaczyna rosnąć. Gdy zrównoważy ono (wspólnie ze sprężyną) ciśnienie pod membraną (od strony dopływu) -zawór główny (2) zacznie się zamykać.
Cechy charakterystyczne:
- wykorzystują do działania ciśnienie procesowe
- pracują poprawnie tylko wtedy, gdy istnieje wymagana minimalna różnica ciśnień ΔPMIN na zaworze. W przypadku, gdy będzie ona mniejsza od wymaganej, zawory tego typu nie będą działały prawidłowo.
- różnica ciśnień ΔP potrzebna jest do otwarcia zaworu i utrzymania go w pozycji otwartej,
- prędkość otwierania i zamykania zaworu zależy od wielkości tej różnicy
- ze względu na małe przekroje kanałów sterujących są wrażliwe na zanieczyszczenia (należy stosować przed nimi odpowiednie filtry)
- długi czas zadziałania (w niektórych typach dochodzi nawet do kilku sekund)
- mniejsza żywotność (średnio – kilkaset tysięcy cykli pracy)
W wielu instalacjach trudno jest określić jaka minimalna różnica ciśnień ΔPMIN będzie występowała na zaworze. W związku z tym istnieje konieczność stosowania zaworów uniwersalnych, pracujących niezależnie od różnicy ciśnień. Są to zawory ze wspomaganiem.
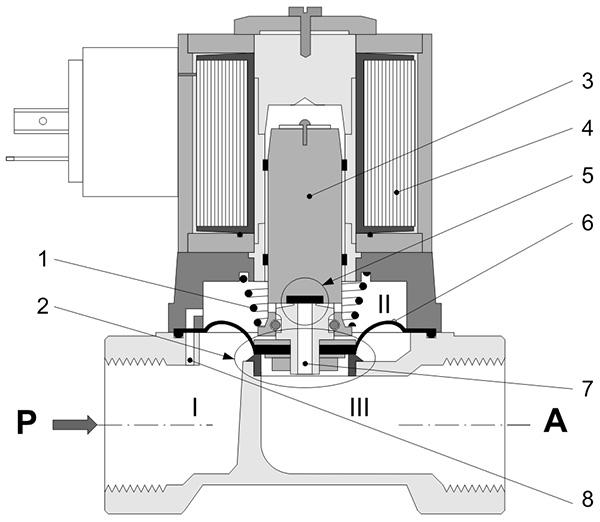
Budowa takiego zaworu jest zbliżona do zaworu pośredniego działania z tą różnicą, że zawór-pilot (5) umieszczony jest w samym grzybku zaworu głównego (2).Zawieradło (membrana) zaworu głównego (2) podnoszone jest przez rdzeń ruchomy (3) (zawieradło zaworu-pilota (5)) za pośrednictwem układu elastycznego, tzn. umożliwiającego najpierw pełne otwarcie gniazda zaworu-pilota (bezpośredniego działania).
Przestrzeń II nad membraną (6) jest połączona z obszarem I od strony dopływu P stale otwartym kanałem wyrównawczym (8). Zawór-pilot (5) łączy poprzez kanał pilotowy (7) obszar II nad membraną z obszarem III od strony wypływu A. Gdy zawór jest zamknięty kanał pilotowy jest również zamknięty. Ciśnienie nad membraną jest równe ciśnieniu od strony dopływu.
Przy małej lub zerowej różnicy ciśnień ΔP zawór pracuje jak zawór bezpośredniego działania. Siła podnosząca rdzeń po podaniu napięcia na cewkę (4), otwiera równocześnie zawór-pilot (5) i główny zawór (2). Zamknięcie obu zaworów następuje pod wpływem sprężyny(1) po zaniku prądu w cewce (4).
Gdy różnica ciśnień ΔP jest duża zawór pracuje jak zawór pośredniego działania. Podanie napięcia na cewkę powoduje otwarcie zaworu-pilota (5). Następuje połączenie obszaru II nad membraną z obszarem III od strony wypływu. Ciśnienie nad membraną spada, zawór główny (2) się otwiera pod wpływem ciśnienia różnicowego ΔP, które utrzymuje go w pozycji otwarcia.
Zanik prądu w cewce wymusza zamknięcie zaworu-pilota. Ciśnienie nad membraną rośnie. Pojawia się siła równoważąca siłę pochodzącą od różnicy ciśnienia ΔP na zaworze. Zawór się zamyka.
Cechy charakterystyczne
- stosuje się je w układach, gdzie różnica ciśnień ΔP na zaworze jest zmienna lub trudna do określenia
- pracują prawidłowo niezależnie od wielkości ciśnienia różnicowego ΔP na zaworze – chociaż wykorzystują do działania ciśnienia procesowe
- można je stosować od zera do maksymalnego ciśnienia pracy PMAX, na które zostały skonstruowane
- posiadają stosunkowo duże opory przepływu (mały współczynnik Kv) – względy konstrukcyjne
są wrażliwe na zanieczyszczenia – należy zapewnić odpowiednią czystość medium (stosować filtry) - długie czasy zadziałania – mała częstotliwość łączeń
- żywotność – mniejsza niż zaworów bezpośredniego działania (kilkaset tysięcy cykli pracy)
Konstrukcja tych zaworów oraz sposób ich działania związane są z funkcją jaką pełnią współpracując z detektorami gazu(systemami detekcji) .
W zaworach tych można wyróżnić następujące elementy:
- element umożliwiający ręczne otwaranie (np. uchwyt (3))
- zawieradło (3a, 6, 6a) napędzane ręcznie i blokowane w pozycji otwarcia przez mechanizm ryglująco-spustowy (5)
- zawór główny (2)
- wyzwalacz elektromagnetyczny (4)
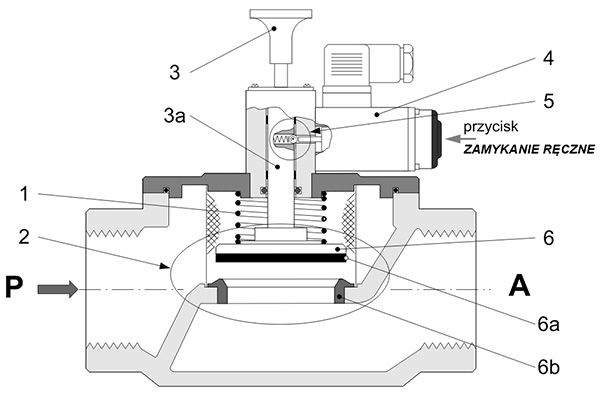
Zawory tego typu można otworzyć tylko ręcznie.
Ciągnąc za uchwyt ręcznego otwierania zaworu (3) przemieszczamy zawieradło w do momentu zablokowania go przez mechanizm blokująco-spustowy (5) w położeniu pełnego otwarcia. Jest to położenie robocze zaworu – gaz może swobodnie przepływać przez zawór.
Zwolnienie blokady, a tym samym natychmiastowe zamknięcie zaworu, może nastąpić na dwa sposoby:
- impuls elektryczny podany (np. z detektora gazu) na cewkę wyzwalacza elektromagnetycznego (4) powoduje ruch jego rdzenia, który działając na mechanizm ryglująco-spustowy (5) zwalnia blokadę zawieradła. Zawieradło pod wpływem sprężyny dociskowej (1) przechodzi w pozycję zamknięcia. Odcięcie przepływu gazu następuje przez mechaniczny docisk grzybka (6) wraz z uszczelką (6a) do gniazda zaworu (6b) wywołany sprężyną dociskową.
- naciskając przycisk „ZAMYKANIE RĘCZNE” wymuszamy mechanicznie ruch rdzenia wyzwalacza elektromagnetycznego, powodując tym samym zwolnienie blokady zawieradła i zamknięcie zaworu.
Cechy charakterystyczne:
- zarówno w pozycji otwartej jak i zamkniętej nie wymagają zasilania – są energooszczędne (impuls elektryczny o czasie trwania < 1s potrzebny jest jedynie do zamknięcia zaworu)
- niewrażliwe na zanik napięcia zasilającego system – jego brak czy chwilowe zaniki nie powodują zmian w przepływie gazu przez zawór
- odporny na wszelkie zakłócenia mogące w stanie zamkniętym spowodować jego przypadkowe otwarcie (tylko świadome działanie osób nadzoru)
- bardzo małe pole manewrowe wymagane do obsługi oraz mała siła potrzebna do otwarcia zaworu
- prosta, tania, niezawodna i lekka konstrukcja
- duża żywotność